AI자율주행시스템공학과 조성건 교수 연구팀, 국제 학술지 표지논문 선정
- 2026-06-26

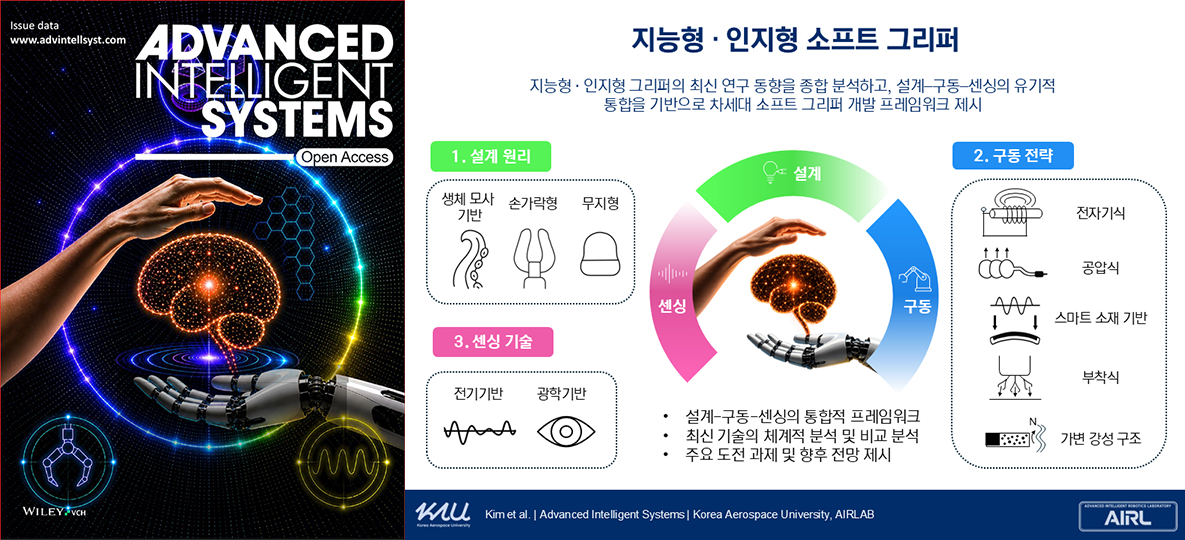
우리 대학 AI자율주행시스템공학과 조성건 교수 연구팀이 소프트 로봇 분야 리뷰 논문으로 국제 학술지 'Advanced Intelligent Systems'의 표지논문에 선정됐다. 학부생들이 공동 제1저자로 연구를 이끈 성과로, 해당 저널은 IF 6.1, ROBOTICS 분야 JIF RANK(Q1) 상위 10% 내외에 속한다.
로봇 기술은 이제 산업 현장을 넘어 의료와 서비스, 우주 탐사까지 활동 무대를 넓히고 있다. 하지만 지금까지의 로봇은 대부분 딱딱한 몸체로 만들어져, 모양이 제각각이거나 예측하기 어려운 환경에서 물체를 사람처럼 부드럽게 다루는 데에는 한계가 있었다. 이런 한계를 풀어줄 대안으로 떠오른 것이 생명체처럼 유연하게 모양을 바꾸며 환경에 적응하는 '소프트 로봇'이다. 그중에서도 물체를 직접 잡고 다루는 '소프트 그리퍼'는 로봇이 할 수 있는 일의 범위를 넓히는 핵심 기술로 꼽힌다.
연구팀이 발표한 논문 '차세대 지능형 파지조작 위한 설계, 구동, 센싱 기술 통합 분석(Towards Advanced Intelligent and Perceptive Soft Grippers)'은 이 소프트 그리퍼를 바라보는 관점을 새롭게 제시했다. 그리퍼를 단순한 기계 장치가 아니라, 형태(Morphology)와 움직임을 만드는 구동(Actuation), 그리고 주변을 감지하는 센싱(Sensing)이 하나로 어우러진 '체화 지능 시스템'으로 재정의한 것이다. 연구팀은 그동안 발표된 다양한 연구 사례를 폭넓게 분석해, 소프트 로봇 기술이 어느 방향으로 나아가고 있는지 그 큰 흐름을 짚었다.
특히 연구팀은 로봇의 특정 부위에 기능을 몰아주는 대신, 몸체 전체에 기능과 역할을 고루 나누는 설계 방식에 주목했다. 이렇게 하면 복잡하고 까다로운 환경에서도 다양한 모양의 물체를 더 유연하면서도 안정적으로 다룰 수 있다. 개별 기술을 하나하나 나열하는 데 그치지 않고, 설계 원리와 시스템 통합이라는 관점에서 소프트 그리퍼를 이해할 수 있는 기준을 세웠다는 점에서 학술적 의미가 크다.
이러한 연구는 앞으로 새로운 로봇 시스템을 설계하려는 연구자들에게 길잡이가 될 것으로 기대된다. 나아가 제조 자동화와 의료·서비스 로봇은 물론, 극한 환경이나 우주 탐사처럼 사람이 직접 다가가기 어려운 분야에서도 로봇의 쓰임새를 넓히는 데 보탬이 될 전망이다. 길게 보면 사람과 비슷한 수준의 유연함과 적응력을 갖춘 지능형 로봇으로 이어질 가능성도 담고 있다.
이번 성과는 학부생들이 주도했다는 점에서 더욱 뜻깊다. 공동 제1저자인 김하늘·신하연 학생은 모두 AI자율주행시스템공학과 학부생이며, 항공우주 및 기계공학과 석사과정 박세익 학생이 제2저자로 함께했다. 교신저자는 조성건 교수와 호주 커틴대학교(Curtin University) 전기전자공학과 심창범 연구교수가 공동으로 맡아, 한국과 호주가 함께한 국제 공동연구로 진행됐다.
조성건 교수는 "소프트 그리퍼를 형태와 구동, 센싱이 통합된 체화 지능 시스템으로 재정의하고, 지능형 소프트 그리퍼의 통합 설계 프레임워크를 제시했다는 점에서 의의가 있다"며 "앞으로 환경과 능동적으로 상호작용하는 지각형 로봇 시스템으로 발전하는 기반이 되기를 기대한다"고 말했다.
제1저자 김하늘 학생은 "학부생으로서 기초 학문의 중요성과 융합적 사고의 가치를 직접 체감한 경험이었다"며 "탄탄한 기초를 바탕으로 서로 다른 개념과 기술을 연결하면 학부생도 실제 연구에 기여할 수 있다는 가능성을 확인했다"고 밝혔다.
이번 연구는 과학기술정보통신부와 한국연구재단이 지원하는 '연구 운영비 지원(R&D)'과 '국가간협력기반조성(R&D)' 사업의 지원을 받아 수행됐다.
(관련논문 바로보기)
- 이전글 이전글이 없습니다.
- 다음글 부준홍 명예교수, 한국인 최초 George Grover Medal Award 수상
(10540) 경기도 고양시 덕양구 항공대학로 76
TEL - (02) 300-0114 FAX - (02) 3158-5769 E-mail - webmaster@kau.ac.kr
COPYRIGHT 2022 Korea Aerospace University. All right reserved.
